
|
| 2024-09-30 Getting ready for the final demonstration |
| Once the DrapeCell was assembled at Baltico several updates were made to various software modules. This included the action recognition to robustly detect humans also in the new configuration of the workcell and the control system, that enables the collaborative transport of large plies. The task and motion planning, which manages the workflow was updated, making the whole process more efficient. Adaptations were also made to allow that a single operator is running the whole process, including the loading of the plies on the table. Extended tests were done with a set of representative plies of different size and shape and covering all modes of collaboration. By mid October the whole system is expected to be read to start the final evaluation runs, starting with usability experiments done by project partner AAU. |
|
|
| 2024-08-30 DrapeCell on the road again |
| In August 2024 DrapeCell was once again made ready to be shipped to one of the project partners. This time the robot was going to project partner Baltico in Northern Germany. Baltico had just finished a new building with sufficient space to host the DrapeCell for the final demonstration. As soon as the concrete was had dried and was strong enough to carry the heavy workcell, it was disassembled at Profactor and sent to Baltico. A week after the whole workcell was assembled again and after and extended functional check, it was ready for the integration of the latest developments and the final evaluation. The DrapeCell will now remain at Baltico for several months up to the end of 2024. |

|
| 2024-04-23 Boat-building experiments |
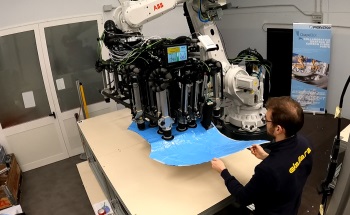
| The final demonstration of the DrapeBot project consists of building a large, composite propeller for a ship. This made it necessary to adapt the workcell. Positions for the mould and the table, where the cut pieces are presented, had to be found to ensure that the plies can be properly picked up, transported and placed. Particular emphasis was put on the collaborative transport so as to allow sufficient space for the human operator to move around. A particular challenge was the large number of 70 plies that are placed, each with slightly different shape and with sizes ranging from very small pieces up to almost 2m in length. Also, a larger variety of materials is used in this application and adaptations of the gripper were necessary. In particular needle grippers had to be added, because the suction units just could not deal with the soft and porous dry fabric. The whole arrangement of the suction heads on the gripper was investigated in detail, taking all requirements into account. Several iterations were needed until a solution was found that was suitable for all 70 plies. |
|
|
| 2024-03-13 DrapeBot at the European Robotics Forum |
| The European Robotics Forum 2024 was held in Rimini from 13th to 15th of March. More than 1000 people participated in the event and DrapeBot was prominently presented there. Aside from presentations of topics related to DrapeBot in 3 workshops, project partner UNIPD also organised an exhibition of the DrapeBot technology. While it is impossible to transfer the large workcells to such an event, UNIPD had prepared a small cobot that could be safely used at the event. The robot was able to demonstrate the key features of the DrapeBot system on a mock-up draping process and it could even allow interaction with participants to show the collaborative aspects. Earlier in March, DrapeBot technologies related to the inspection of the fabric were also presented by Profactor at the JEC fair in in Paris. |

|
| 2024-01-31 DrapeCell is coming home |
| After the demonstration on the automotive use case at Dallara was completed, a set of performance indicators were acquired and the workcell was disassembled and shipped back to Profactor. The analysis during the demonstrations indicated that the system has reached a remarkable level of robustness and even though it is a technically very complex system, the end users could operate the workcell without assistance by the developers. In order to improve the usability of the system and to enhance the efficiency of the draping process, the times spent on each step of the process were investigated in detail. It was also found that quite a bit of time can be saved in the overall process, if single process steps are done in parallel rather than in a strictly sequential manner. These improvements will be implemented in the coming months, before the workcell is shipped to the final demonstration at project partner Baltico in Germany. |
|
| 2023-12-14 Complete Draping Process Demonstrated |
| After several months of testing and optimization an integrated demonstration was conducted at Dallara. The demonstration included the human-robot collaborative draping of five plies, showing all different interaction modes from robot-only to fully collaborative draping. The demonstration was made on the example of the front hood of the Dallara Stradale. Carbon fiber patches of different sizes had to be handled, including large patches, that could only be transported through a human-robot collaborative transport. After finishing the draping, an automatic inspection was done, including the scanning of fiber orientations and the detection of typical defects. Prior to this demonstration all software modules were updated in several iterations to improve the speed and smoothness of the human-robot collaboration. Automatic detection of ply and mould positions made the whole system robust to typical changes that may happen during the process. Additional modes of communication were added, by integrating a screen that shows the current state of the process and that helps the user to understand and predict the robot’s next actions. |

|
| 2023-09-18 DrapeCell on a Trip to Italy |
| In September 2023 the DrapeCell which was integrated at Profactor in Steyr (Austria) was temporarily moved to Italy. Several months of tests were planned at project partner Dallara and for this purpose the DrapeCell had to be disassembled, shipped to Dallara and then re-assembled there. Due to the size of the robot and due to the weight carried by the robot, the workcell also included a massive platform with a weight of several tons. This platform was disassembled into “manageable” pieces and loaded in a truck together with the robot. A few days later it arrived in Italy, where Dallara had emptied a workshop to host the DrapeCell for the coming months. About one week after arrival the DrapeCell was back “alive” and testing could start at Dallara. |

|

|

|

|

|

|

|

|
|
|

|
|
|